中国科学技术大学物理学院、合肥微尺度物质科学国家研究中心袁军华和张榕京研究组在细菌与固体表面的相互作用机制研究中取得重要进展。研究团队发现鞭毛着生位置是决定推进型细菌表面捕获稳定性的关键因素,并揭示了鞭毛钩(连接鞭毛丝与细胞体的柔性接头)弯曲方向的差异如何影响细菌的表面驻留行为。相关研究成果以“Flagellar location determines the stability of bacterial surface entrapment”为题,于10月27日发表在《美国国家科学院院刊》(PNAS)上。
细菌在自然环境中频繁遇到固体表面,如管道内壁、医疗植入物表面或土壤颗粒等。当它们游动靠近这些表面时,往往会被“捕获”,在表面附近长时间地进行盘旋运动。这一“表面捕获”现象对细菌的生态适应,尤其是生物膜的形成至关重要。以往的研究大多以大肠杆菌为模型,认为这种现象主要由流体力学相互作用引起。然而,这些基于大肠杆菌建立的简化模型,虽然理论上适用于所有“推进式”(即由尾部鞭毛推动前进)的细菌,却无法解释为何其他形态相似的极性单鞭毛菌(如铜绿假单胞菌、溶藻弧菌等)在表面停留的时间要比大肠杆菌短得多,这表明现有物理模型中存在被忽略的关键因素。
为了探究这一谜题,研究组首先排除了潜在因素之一¾鞭毛数量的影响。他们发现,即使只有一根鞭毛,大肠杆菌也能被表面稳定捕获。随后,研究组将焦点转向了不同菌株的另一显著差异¾鞭毛的着生位置。他们通过基因编辑技术,构建了一种鞭毛着生位置不再局限于细胞极端的铜绿假单胞菌突变株。令人惊奇的是,当鞭毛生长在细胞侧面时,细菌在表面的停留时间比鞭毛在极端时显著延长了数十倍以上,其表面捕获行为变得与大肠杆菌非常相似。
为了探究这一现象背后的物理机制,研究组进一步通过高时空分辨的荧光成像技术,直接观测了细菌在表面附近的姿态角变化(图1),提出了鞭毛钩弯曲力矩的关键作用。他们发现,当细菌“头朝下”撞向表面时,鞭毛钩会因受力而弯曲。对于鞭毛在极端的细菌,弯曲的鞭毛钩产生的力矩会帮助细胞体调整姿态,使其更容易通过热涨落(布朗运动)从表面逃逸。然而,对于鞭毛在侧面的细菌,鞭毛钩的弯曲方向与极端鞭毛相反,其产生的力矩反而会抑制细胞体的姿态调整,使其更稳定地被困在表面,难以逃脱。研究组的理论计算也定量地证实了这一机制。
该研究不仅解决了长期以来理论模型与实验观测之间的矛盾,也为深入理解微生物生态、生物膜形成的初始阶段以及细菌感染过程提供了关键见解。此外,该研究也为设计仿生微纳机器人和微生物介导的活性药物递送系统提供了新思路,例如,通过调控人造微型机器人的“推进器”位置,可以精确控制其在目标区域的停留与探索行为。
物理学院特任副研究员陶安泰为论文第一作者。上述研究得到了国家自然科学基金委、科技部基金以及科大新医学联合基金的支持。
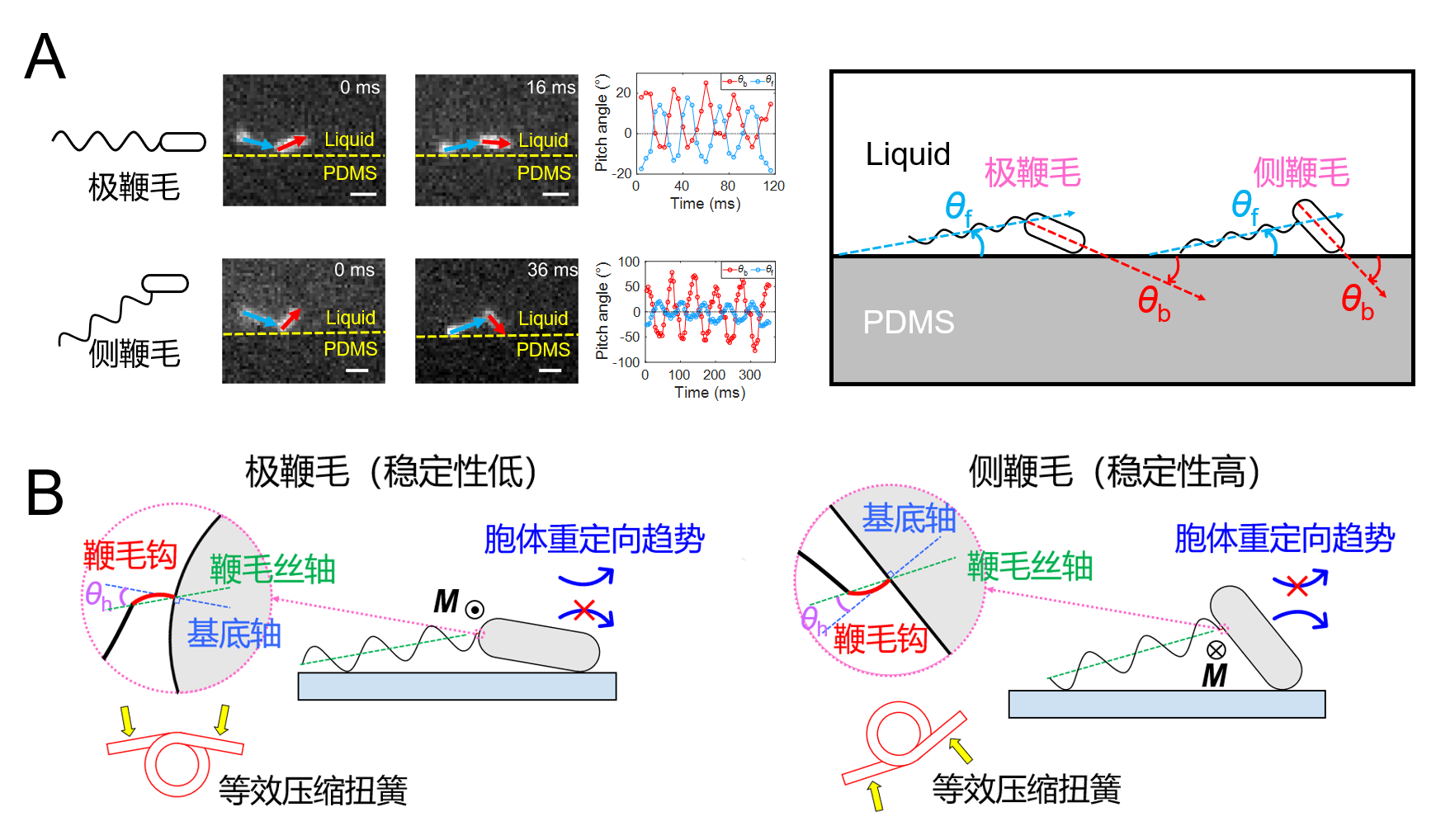
图1. 鞭毛着生位置对推进型单鞭毛菌近表面运动行为的影响。(A) 高时空分辨的荧光观测揭示了细菌相对于PDMS侧壁的两个倾角随时间的演化。θb表示胞体轴与侧壁之间的倾角,θf表示鞭毛轴与侧壁之间的倾角。荧光图像对应倾角达到局部极值的典型时刻。正值和负值分别对应远离和朝向表面的构型。比例尺:2微米。(B)极鞭毛和侧鞭毛细菌贴壁运动的稳定性以及鞭毛钩弯曲方向的差异。M表示弯曲鞭毛钩产生的力矩,θh表示鞭毛基底轴与螺旋鞭毛丝轴的夹角。
论文链接:https://doi.org/10.1073/pnas.2506380122
(物理学院、科研部)
